Tasarım #14
açıkElektronik-Servo Connector
0%
Dosyalar
{kind=link}
{kind=link}
Ferzende Tekçe tarafından 2 yıldan fazla önce güncellendi
- Dosya AdimRobot.part01.rar AdimRobot.part01.rar eklendi
- Dosya AdimRobot.part02.rar AdimRobot.part02.rar eklendi
- Dosya AdimRobot.part03.rar AdimRobot.part03.rar eklendi
- Dosya AdimRobot.part04.rar AdimRobot.part04.rar eklendi
- Dosya AdimRobot.part05.rar AdimRobot.part05.rar eklendi
Cihazın kontrol kartı için düşünülen 3 parçalı tasarımın ilk kısmı tamamlandı. Bu ilk kısımda USB haberleşme, 7 Servo motor için gerekli port bağlantısı, her servo için birer adet OptoCupler girişi, 2 adet yedek OptoCupler girişi ve alt katmanlar ile haberleşme için gerekli port eklendi. 2 katmanda tamamen Loadcell için gerekli MCU ve bağlantılar olacak. 3 katmanda ise sadece step motor sürücü işlemleri ve Mutlak encoder okuma işlemleri için kullanılacak. (Katmanlar yer değiştirebilir.) Tamamlanan çizim için gerekli malzemelerin siparişi verildikten sonra bord üretim için jblpcb.com'a gönderilecek. Gerekli çizim dosyaları ve kütüphaneler ektedir.
Ferzende Tekçe tarafından 2 yıldan fazla önce güncellendi
Bu tasarımda bir çok eksiklik farkedildi. Bu tasarım değiştirilerek yeni versiyon yaratıldı.
Ferzende Tekçe tarafından 2 yıldan fazla önce güncellendi
Bu yeni versiyonda işlemci karının üzerinde sadece besleme, Loaddcel ADC ve soketler konumlandırıldı. Motor ve sensörler için değiştririlebilinir bir bord tasarımı yapıldı. Bu bord tasarımında;
Bu versiyon Çin’e sipariş edildi. her borda 4 adet servo veya step morto için bağlantı var
servolar için 4 adet, sadece 8 optik sensör için bir port ve 4 adet step ile 4 adet
optik sensör için spi paralel çoğullayıcı portu eklendi. Buruma göre ihtiyaç olanalar etkinleştirilerek kullanılacak
Ferzende Tekçe tarafından yaklaşık 1 yıl önce güncellendi
- Konu: Elektronik -> Elektronik-Anakart
Encoder Reset Ucu Boşta bırakılmış Bağlanacak PB15
PC1 CSLimit2 ETH_MDC Ucuna bağlanmış Bağlanmadı PA0
PD9 D_R1 STLINK_TX ucuna bağlanmış Bağlanamadı PG0
PA8 D_R3 USB_OTG_FS_SOF ucuna bağlanmış (Bağlantı yapılmadı) PB5
PA12 D_R4 USB_OTG_FS_DP ucuna bağlanmış (Bağlantı Yapılmadı) PB12
PA2 ON_R3 ETH_MDI ucuna balnamış. (Bağlantı yapılamdı) PB6
PD8 ON_R4 STLINK_RX ucuna bağlanmış Bağlanmadı PC8
PG11 ON_R1 ETH_TX_EN ucuna bağlanmış (Bağlantı yapılmadı) PG1
PG13 TIL_R1 ETH_TX_DO ucuna bağlanmış. Bağlantı yapılmadı PF2
PC4 TIL_L3 ETH_RX_DO ucuna bağlanmış. Bağlantı yapılmadı PE7
PG7 RDY_L1 ETH_OTG_FS_OVERCR ucuna bağlanmış (Bağlantı yapılmadı) PD15
PD10 RDY_R1 ETH_OTG_FS_POWER_EN ucuna bağlanmış (Bağlantı yapılmadı)PD14
PA15 SELECT 1 A15 JTDI DEBUG ucuna bağlanmış (Bağlantı yapılmadı) PE3
PA14 SELECT 2 A14 SWCLK DEBUG ucuna bağlanmış (Bağlantı yapılmadı) PD7
E5V Ucu 5 volta bağlanmamış.
Ferzende Tekçe tarafından yaklaşık 1 yıl önce güncellendi
- Dosya Adsız.png Adsız.png eklendi
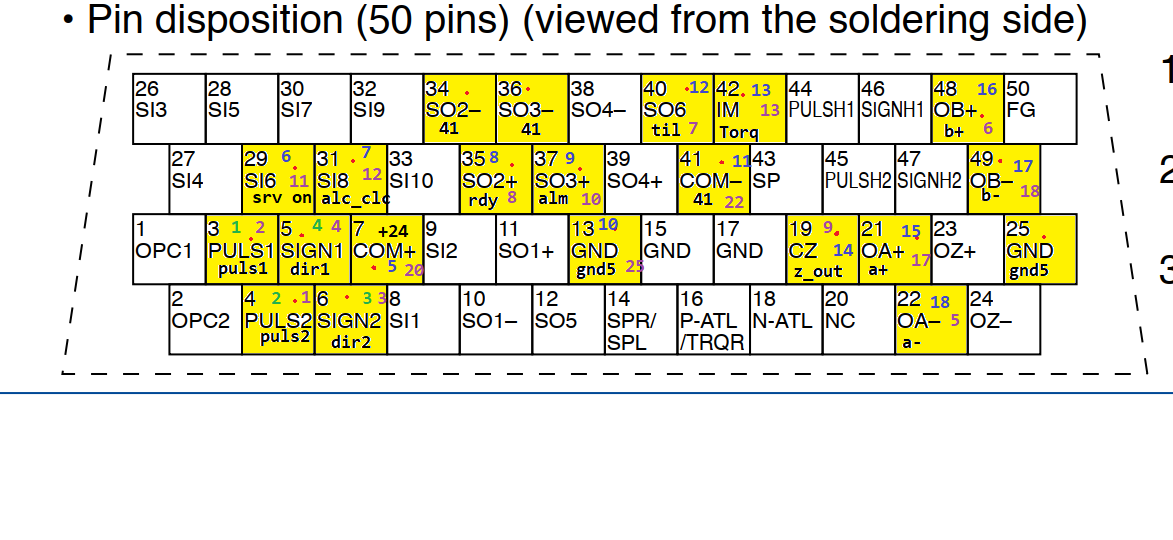
- Konu: Elektronik-Anakart -> Elektronik-Servo Connector
- Kalan zaman 0.00 s yapıldı
Ferzende Tekçe tarafından 12 ay önce güncellendi
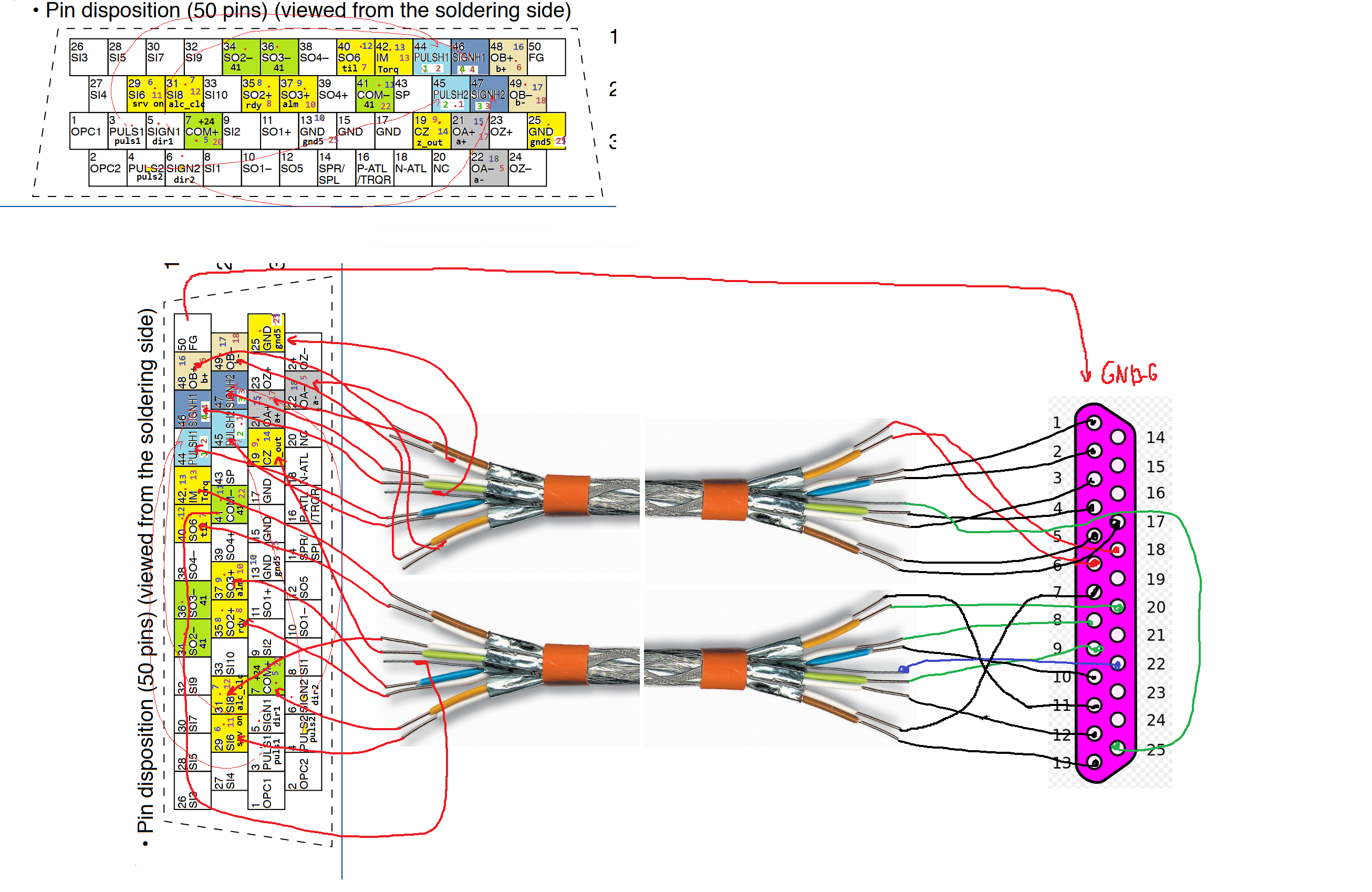
- Dosya yeni_bağlantı_feyz.png yeni_bağlantı_feyz.png eklendi